연구 내용을 기반으로 하여 한학기 동안 수행할 연구 내용의 범주에 대한 정의와 함께, 연구 proposal을 하는 것으로 하겠습니다. 각자 20분 정도 발표 준비를 하기 바랍니다.
- 연구배경
- 연구목표
- 향후 연구 계획 (주별로 작성)
1. Introduction — Why VectorDB Matters
1.1 Vector Dataset Size
VectorDB usage in RAG system. Assumption knowledge base like wikipedia
| Category | Calculation | Result |
|---|---|---|
| Short articles (90%) | 6.7M × 0.9 × 1 vector | 6.03M vectors |
| Long articles (10%) | 6.7M × 0.1 × 2.5 vectors | 1.675M vectors |
| Total | 6.03M + 1.675M | 7.705M vectors |
-
Assumes no chunking; each document up to 8192 tokens (OpenAI embedding model limit).
-
Using 1,024-dimensional embeddings, each vector occupies 4 KB (float32).
-
Storage requirement for raw vectors:
1.2 Cloud Reality Check
| Dimension | Traditional Assumption | Cloud Reality (256 GB RAM Instance) |
|---|---|---|
| Storage | Local NVMe (μs latency) | Network-attached EBS / persistent disks (ms latency) |
| Memory | 512 GB–1 TB RAM affordable once | RAM constrained to 256 GB, high per-hour costs |
| Scaling | Single rack, static provisioning | Elastic scaling and auto-recovery expected |
Key takeaway:
Existing vector search engines, optimized for abundant RAM and fast local disks, face significant cost and latency constraints in 256 GB cloud environments.
2. HNSW Recap — Strengths & Inner Workings
2.1 Concept
- HNSW (Hierarchical Navigable Small-World Graph) builds multi-layer graphs:
- Sparse upper layers
- Dense base layer
- Greedy graph traversal from top layers to bottom achieves efficient approximate search.
2.2 Why It Shines
| Property | Effect |
|---|---|
| Logarithmic search paths | Sub-millisecond CPU even at large scale |
| Strong graph locality | High recall (> 0.98) without exhaustive scanning |
| Purely in-memory design | No decompression or disk access during search |
2.3 Internal Parameters Cheat-Sheet
| Symbol | Typical Range | Purpose |
|---|---|---|
| M | 16–32 | Max neighbors per node |
| efConstruction | 200–400 | Graph construction quality trade-off |
| efSearch | 32–128 | Search recall vs latency |
3. HNSW Cloud Pain-Points
3.1 Full-RAM Requirement
Memory footprint estimation (float32 format):
Example for Wikipedia-scale:
-
7.7M vectors × 1024 dimensions → ~30.8 GB raw vectors
-
+6.4 GB for graph structure (M=32)
-
⇒ ~37.2 GB total RAM required
-
In practice, indexing additionally requires ~1.5–2× RAM due to working buffers, meaning peak RAM usage can reach 60–80 GB.
3.2 Random Access Pattern
- HNSW graph traversal is non-sequential.
- Each memory miss under mmap triggers a page fault, causing 4–64 KB random reads on network-attached EBS volumes.
- Empirical results show:
- 1000 random 4 KB reads on AWS gp3 ≈ 10 ms p99 latency (vs <200 μs on NVMe).
Random disk I/O dominates latency unless the full graph resides in memory.
3.3 Cost Explosion
| Instance | RAM Size | On-demand Cost (2025 AWS) |
|---|---|---|
| r6i.2xlarge | 64 GB | $340/month |
| r6i.8xlarge | 256 GB | $1,350–1,600/month |
Observation:
Even with 256 GB RAM instances, full in-memory indexing and search is feasible only for mid-scale datasets (e.g., ~7–25M vectors at 1024 dims).
Billion-scale indexes become impractical without disk-resident augmentation.
3.4 RAM Overhead During Index Building — FAISS Example
Even if the saved HNSW index is ~37 GB,
index construction phase uses far more RAM.
Breakdown during FAISS HNSW indexing:
| Component | Description | Size Estimate (7.7M vectors) |
|---|---|---|
| Raw vectors (float32) | Full vector set | ~30.8 GB |
| Neighbor links (graph) | HNSW edges | ~6.4 GB |
| Candidate pools and heaps | Search buffers for each thread | 10–20 GB |
| Other malloc overhead | Allocator slack, fragmentation | 10–15 GB |
| Peak RAM usage | - | ~60–80 GB |
Thus, indexing typically demands 1.5–2× the final saved size.
3.5 Key Reasons for High RAM Usage During FAISS HNSW Indexing
- Dynamic Graph Construction:
- Insertions dynamically modify neighbor lists, requiring mutable in-memory structures.
- Multiple Working Buffers:
- Multi-threaded search and insertion use separate candidate buffers and priority queues.
- Low-Latency Full Dataset Access:
- Distance computations must happen in-memory for speed.
- Temporary RAM Peaks:
- RAM usage drops after build but peaks significantly during indexing.
3.6 RAM Budget Estimation for 256 GB Instances
Given 256 GB RAM:
- 50% reserved for raw vectors (~128 GB)
- Remaining accommodates graph links, candidate buffers, and overhead
Thus:
- Each 1024-dim float32 vector (4 KB) means:
- Considering safety margins for working memory:
- Practical safe capacity ≈ 25–28M vectors
| Component | Estimate |
|---|---|
| 1 vector size | 4 KB |
| Max vectors (raw math) | 32M |
| Practical limit | ~25–28M vectors |
Conclusion:
On a 256 GB RAM instance, indexing up to ~28 million 1024-dimensional vectors is feasible with FAISS HNSW.
Beyond that, hybrid disk-resident approaches become necessary.
4. IVF & PQ Quick Glance — Alternative Trade-offs
4.1 IVF (Inverted File Index)
- Clusters vectors using k-means into √N centroids.
- Search probes a small number (nprobe) of closest clusters only.
- Pros: Great memory efficiency; scalable to billions of vectors.
- Cons: Missed centroids lead to sharp recall drops.
4.2 Product Quantization (PQ/OPQ)
- Compresses vectors by dividing into m subspaces, quantizing each separately.
- 16× compression typical (128-dim → 8 bytes).
- Pros: Massive memory savings.
- Cons: Approximate distances introduce errors; decoder overhead (~50–100 ns per comparison).
4.3 Why IVF-PQ Doesn’t Fully Replace HNSW
- Even optimized IVF-PQ setups achieve only 0.92–0.95 recall, falling short of HNSW (~0.98+).
- Retrieval error can propagate, degrading downstream tasks like answer generation in RAG systems.
5. DiskANN — What It Solved
5.1 Core Idea
- Move most of the vector data and graph structure to SSD, leaving only entry points and coarse metadata in RAM.
- Layout vectors into 4 KB blocks sorted by node ID for sequential access.
- Prefetch relevant blocks during search to minimize random I/O.
5.2 Performance on Local NVMe
| Dataset | RAM Usage | SSD QPS | p99 Latency |
|---|---|---|---|
| 1B vectors (96 dim) | 30 GB (vs 320 GB RAM) | 4000 QPS | ~5 ms |
5.3 Key Techniques
- Block Prefetch Queue: Asynchronously load predicted graph blocks.
- Euclidean Pruning: Skip blocks if current best distance suffices.
- Thread-local Hot Caches: Keep frequently accessed nodes resident.
6. DiskANN Gap in Cloud-Native Environments
6.1 Fixed 4 KB Block Size
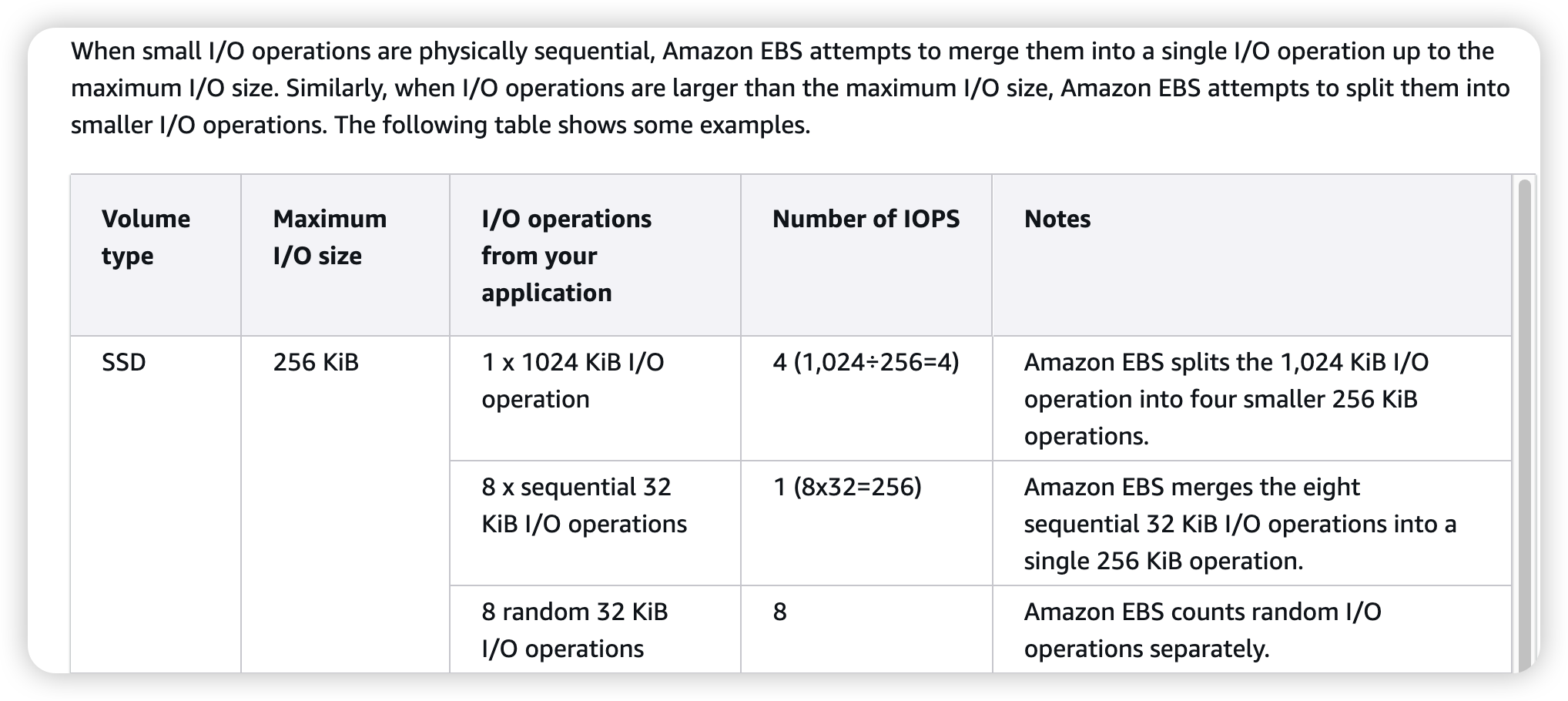
- EBS and S3 favor sequential reads ≥64 KB.
- 4 KB blocks cause excessive fragmentation and IOPS throttling in cloud disks.
6.2 Blind Prefetch Strategy
- Uniform priority prefetch without IOPS-aware scheduling leads to prefetch congestion.
6.3 Missing Compression Path
- Raw float32 vectors occupy large storage.
- For 10M vectors: ~40 GB storage cost (before replication or backup overhead).
6.4 Single-Node Assumption
- No built-in shard management, replication, or recovery.
- Unsuitable for Kubernetes, multi-zone HA, or dynamic cloud scaling.
6.5 Summary Table
| Aspect | DiskANN (Original) | Cloud-Native Requirement |
|---|---|---|
| Block Size | 4 KB fixed | Tunable (≥64 KB) |
| Prefetch Policy | Uniform frontier prefetch | Priority-aware, IOPS-sensitive |
| Deployment Model | Single host | Multi-node sharding + HA |
6.6 Improve DiskANN on Cloud Environment
- DiskANN are optimized prefetch with request small size IO (4kb block size)
- frequent small size IO can be bottleneck on cloud storage like
EBS gp3
- How about bigger block packing to segment?
(example segment)
┌────────────────────────────────────────────┐
│ **Node 1** │
│ Full-precision Vector (128D float32) │ → 512B
│ Neighbor List (R=64, Node IDs) │ → 256B
│ Padding / Reserved Space │ → 256B (alignment to 1KB)
├────────────────────────────────────────────┤
│ **Node 2** │
│ Full-precision Vector (128D float32) │ → 512B
│ Neighbor List (R=64, Node IDs) │ → 256B
│ Padding / Reserved Space │ → 256B (alignment to 1KB)
├────────────────────────────────────────────┤
│ **Node 3** │
│ Full-precision Vector (128D float32) │ → 512B
│ Neighbor List (R=64, Node IDs) │ → 256B
│ Padding / Reserved Space │ → 256B (alignment to 1KB)
├────────────────────────────────────────────┤
│ ... (More Nodes) │
├────────────────────────────────────────────┤
│ **Metadata** │
│ Node IDs included in segment │ → e.g., {Node 1, Node 2, Node 3..}
│ Segment Offset Map │ → {Node 1 @ 0B, Node 2 @ 1KB, ...}
│ Checksum / Validation Data │ → For data integrity
│ Reserved Space for future use │
└────────────────────────────────────────────┘